PID algoritmasının bileşenleri (P, I, D) ne anlama gelir?
 ne anlama gelir?")
Merhaba sevgili meslektaşlarımız,
- PID kontrol algoritmasının temel bileşenleri (P, I, D) ne anlama gelir ve her biri kontrol sürecine nasıl katkıda bulunur?
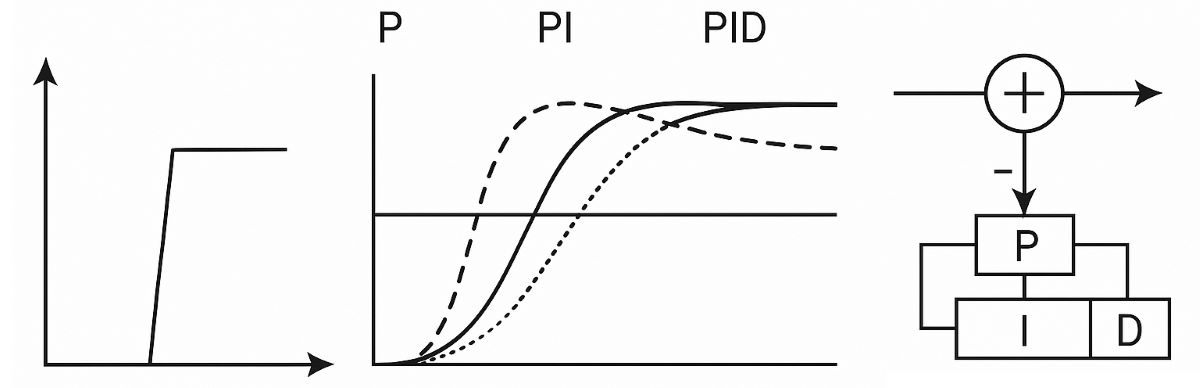
Oransal-İntegral-Türev (PID) kontrol algoritması, endüstriyel otomasyon ve işlem kontrolünde yaygın olarak kullanılan bir kontrol stratejisidir. Oransal (P), İntegral (I) ve Türev (D) olmak üzere üç temel bileşenden oluşur ve her biri kontrol sürecine farklı katkılarda bulunur. PID kontrolörlerini etkili bir şekilde tasarlamak ve ayarlamak için her bileşenin anlamını ve işlevini anlamak esastır.
Oransal (P) Bileşeni:
Anlamı: Oransal bileşen, set noktası (istenilen değer) ile işlem değişkeni (ölçülen değer) arasındaki fark olan hataya anında yanıt vermekten sorumludur.
İşlevi: Oransal terim, hataya orantılı bir kontrol çıkışı üretir. Oransallık sabiti olan oransal kazanç (Kp), yanıtın gücünü belirler. Daha yüksek bir Kp, verilen bir hata için daha büyük bir kontrol eylemi sağlar ve daha hızlı bir yanıta yol açar. Ancak, aşırı Kp aşırı taşma ve salınımlara neden olabilir.
İntegral (I) Bileşeni:
Anlamı: İntegral bileşeni, zaman içinde birikmiş hatayı ele alır ve başlangıç yanıtından sonra kalan herhangi bir kalıcı hatayı (sapma) ortadan kaldırmaya yardımcı olur.
İşlevi: İntegral terim, zaman içinde hatayı toplar ve toplam birikmiş hataya orantılı bir kontrol çıkışı üretir. İntegral kazanç (Ki), integral eylemin ne kadar hızlı biriktiğini belirler. Daha yüksek bir Ki, integral terimin etkisini artırır, kalıcı hatayı azaltır ancak aşırı taşmaya ve daha yavaş yanıt sürelerine yol açabilir.
Türev (D) Bileşeni:
Anlamı: Türev bileşeni, hatanın değişim hızına dayanarak gelecekteki hataları öngörür ve aşırı taşmayı azaltan ve kararlılığı iyileştiren bir sönümleme etkisi sağlar.
İşlevi: Türev terimi, hatanın değişim hızını hesaplar ve bu orana orantılı bir kontrol çıkışı üretir. Türev kazancı (Kd), türev eyleminin etkisini belirler. Daha yüksek bir Kd, sönümleme etkisini artırır, aşırı taşmayı ve yerleşme süresini azaltır. Ancak, aşırı Kd sistemini gürültüye karşı hassas hale getirebilir ve düzensiz kontrol eylemlerine yol açabilir.
Kontrol Sürecine Genel Katkı:
Oransal Terim: Hatalara anında yanıt sağlar ve sistemin tepkiselliğini belirler.
İntegral Terim: Kalıcı hatayı ortadan kaldırır ve işlem değişkeninin set noktasına ulaşmasını ve orada kalmasını sağlar.
Türev Terim: Salınımları sönümler ve kararlılığı iyileştirir, aşırı taşmayı ve yerleşme süresini azaltır.
Özetle, PID kontrol algoritması, işlem değişkenini set noktasına doğru ayarlayan bir kontrol çıkışı sağlamak için oransal, integral ve türev bileşenlerinin etkilerini birleştirir. Oransal terim mevcut hataya, integral terim geçmiş hataları ve türev terim gelecekteki hataları ele alır. İstenilen kontrol performansını elde etmek için PID kazançlarının (Kp, Ki, Kd) uygun şekilde ayarlanması çok önemlidir. Bu, sistem tepkiselliği, kararlılığı ve kalıcı hatanın dengelenmesini
Endüstriyel otomasyon başta olmak üzere üretim ve kontrol sistemlerinin en çok başvurulan kontrol metotlarından biri şüphesizki PID Kontrol formatıdır. Yazılımcı arkadaşlarımızın pekçok defa işini mükemmel derecede kolaylaştıran bu kontrol tipi hakkında sizden gelen sorulara aşağıda cevaplar aradık..
- PID Nedir?
- PID kontrol algoritmasının bileşenleri (P, I, D) ne anlama gelir?
- PID kontrol algoritmasının sınırlandırmaları nelerdir?
- PID kontrol ve istikrarlı çalışma?
- PID kontrolörü ile ilgili yaygın sorunlar nelerdir?
- PID kontrolörü nasıl çalışır?
- PID kontrolöründe (Kp, Ki, Kd) nasıl ayarlanır?
- PID parametrelerinin ayarlanmasında zaman faktörü?
- Farklı tipteki süreçler için PID kontrol parametreleri nasıl ayarlanmalıdır?
- PID ve diğer kontrol stratejileri farkları nelerdir?
- PLC ile PID Kontrolü
- Raspberry Pi ile PID Kontrolü
- Robotik ile PID Kontrolü
- SCADA ile PID Kontrolü
- Servo Motor ile PID Kontrolü
- Hız kontrol cihazı ile PID kontrolü
- Isı kontrol cihazı ile PID Kontrolü
- Arduino ile PID Kontrolü
- Bulut Tabanlı PID Kontrolü
- Endüstriyel PC ile PID Kontrolü
- FPGA ile PID Kontrolü
- Gerçek zamanlı PID kontrol?
- Mikroişlemci ile PID Kontrolü
- PID ile Akım Kontrolü
- PID ile Akış Kontrolü
- PID ile Basınç Kontrolü
- PID ile Frekans Kontrolü
- PID ile Güç Kontrolü
- PID ile Hız Kontrolü
- PID ile Isı Kontrolü
- PID ile Işık Kontrolü
- PID ile Koku Kontrolü
- PID ile Nem Kontrolü
- PID ile pH Kontrolü
- PID ile Pozisyon Kontrolü
- PID ile Radyasyon Kontrolü
- PID ile Renk Kontrolü
- PID ile Ses Kontrolü
- PID ile Seviye Kontrolü
- PID ile Titreşim Kontrolü
- PID ile Tork Kontrolü
- PID ile Viskozite Kontrolü
- PID ile Yoğunluk Kontrolü
"Bu sorular, genellikle "PID Kontrol ve detayları" konusunda birçok insanların aklına gelebilecek soruları da içermektedir. Her kullanıcının veya öğrencinin belirli bir duruma veya uygulamaya bağlı olarak kendi spesifik soruları olacaktır. Cevaplar bağlayıcı değildir veya tamamen kesinlik ifade etmez. "Yukarıdaki makalemizi kaynak göstererek paylaşmanızda bir sakınca yoktur." 11/2022"
 -
-
Sepete Henüz Ürün eklemediniz!