Hız kontrol Cihazı ile PID Yapmak
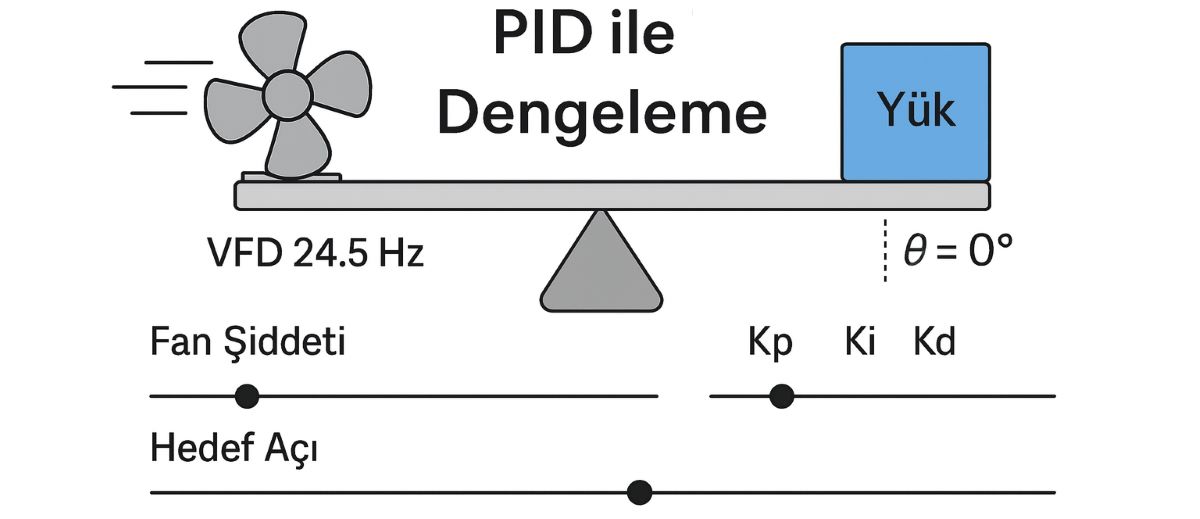
"Hız kontrol cihazı ile PID kontrol", bir işlem değişkeninin (örneğin bir motorun hızı) belirlenmiş bir hedef değere göre sürekli olarak ayarlandığı ve bunun için hızın Değişken Frekans Sürücüsü (VFD) tarafından düzenlendiği otomatik kontrol sistemini ifade eder.
PID denetleyicisi (Orantısal, İntegral, Türev), genellikle endüstriyel kontrol sistemlerinde kullanılan bir kontrol döngüsü geri bildirim mekanizmasıdır. Ölçülen bir işlem değişkeni ile istenen set değeri arasındaki hatayı düzeltmek için çalışır; hesapladıktan ve ardından süreci düzeltebilecek bir düzeltme eylemi çıkarır.
Öte yandan, Değişken Frekans Sürücüsü (VFD), güç kaynağının frekansını ve voltajını değiştirerek bir elektrik motorunu süren bir motor kontrol cihazı türüdür. VFD, motorun hızını yukarı ve aşağı rampalayabilir, enerji tasarrufu sağlar ve daha hassas kontrol sunar.
PID kontrolünü genişletelim. PID denetleyicisi, üç parametreye dayanır: orantısal, integral ve türev, yani PID'nin adı.
Orantısal bileşen, mevcut hataya bağlıdır. Hata büyükse, kontrol çıktısı da büyük olacaktır. Bu, hedef değerin aşılmasına neden olabilir.
İntegral bileşen, geçmiş hataların birikimine bağlıdır. Saf bir orantısal denetleyiciyle oluşan kalıcı durum hatasını ortadan kaldırmayı hedefler. Ancak, hataların zaman içinde birikmesi nedeniyle, sistem yavaş yanıt verebilir.
Türev bileşeni, hatanın değişim hızına bağlıdır. Hatanın mevcut değişim hızına dayalı olarak hatayı "öngörmek" için bir yol sağlar ve sistem yanıtını azaltmaya yardımcı olabilir, aşmayı ve kararsızlığı azaltır.
Bir Değişken Frekans Sürücüsü (VFD):
VFD, bir AC indüksiyon motorunun hızını ve torkunu, motora sağlanan gücün frekansını ve voltajını değiştirerek kontrol eder. İşlem kontrolü ve enerji tasarrufunun önemli olduğu uygulamalarda kullanılan bir motor kontrol şeklidir.
Bir PID denetleyicisi bir VFD ile bir kontrol sisteminde birleştirildiğinde, PID denetleyicisi, sistemin geri bildirimine, örneğin sıcaklık, basınç, akış hızı veya hıza dayalı olarak VFD'ye frekans komutunu ayarlar.
Bir PID-VFD sisteminin nasıl çalıştığına dair bir örnek:
Bir boru hattında sabit bir basınç sürdürmek istediğinizi varsayalım. Boru hattına takılan bir basınç sensörü, gerçek basıncı PID denetleyicisine geri bildirir. Eğer basınç çok yüksekse, PID denetleyicisi VFD'ye daha düşük bir frekans komutu hesaplar, bu da motor hızını azaltır, pompalama çıkışını azaltır ve basıncı düşürür. Tersine, basınç çok düşükse, PID denetleyicisi VFD'ye daha yüksek bir frekans komutu hesaplar, motor hızını artırır ve pompalama çıkışını ve dolayısıyla basıncı artırır.
Bu, basitleştirilmiş bir açıklamadır ve pratikte, bir PID denetleyicisinin bir VFD ile iyi çalışacak şekilde ayarlanması karmaşık bir görev olabilir, çünkü bu, stabil ve duyarlı bir sistem davranışı elde etmek için PID parametrelerini (orantısal kazanç, integral zaman ve türev zamanı) ayarlamayı içerir.
Sepete Henüz Ürün eklemediniz!